- Diagnostic and Assessment


Welcome to china's largest care and rehabilitation expo with 50,000 visitors
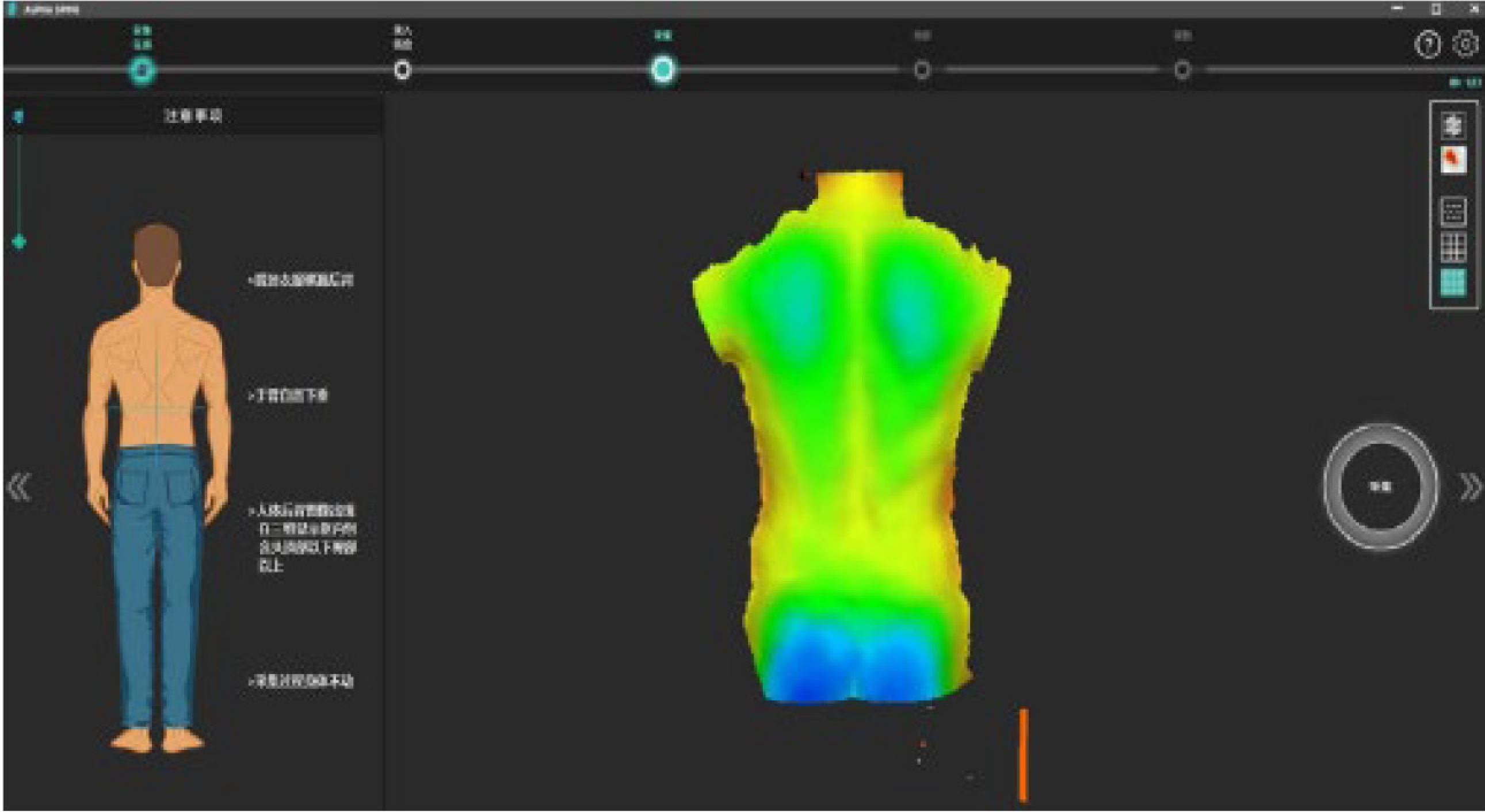
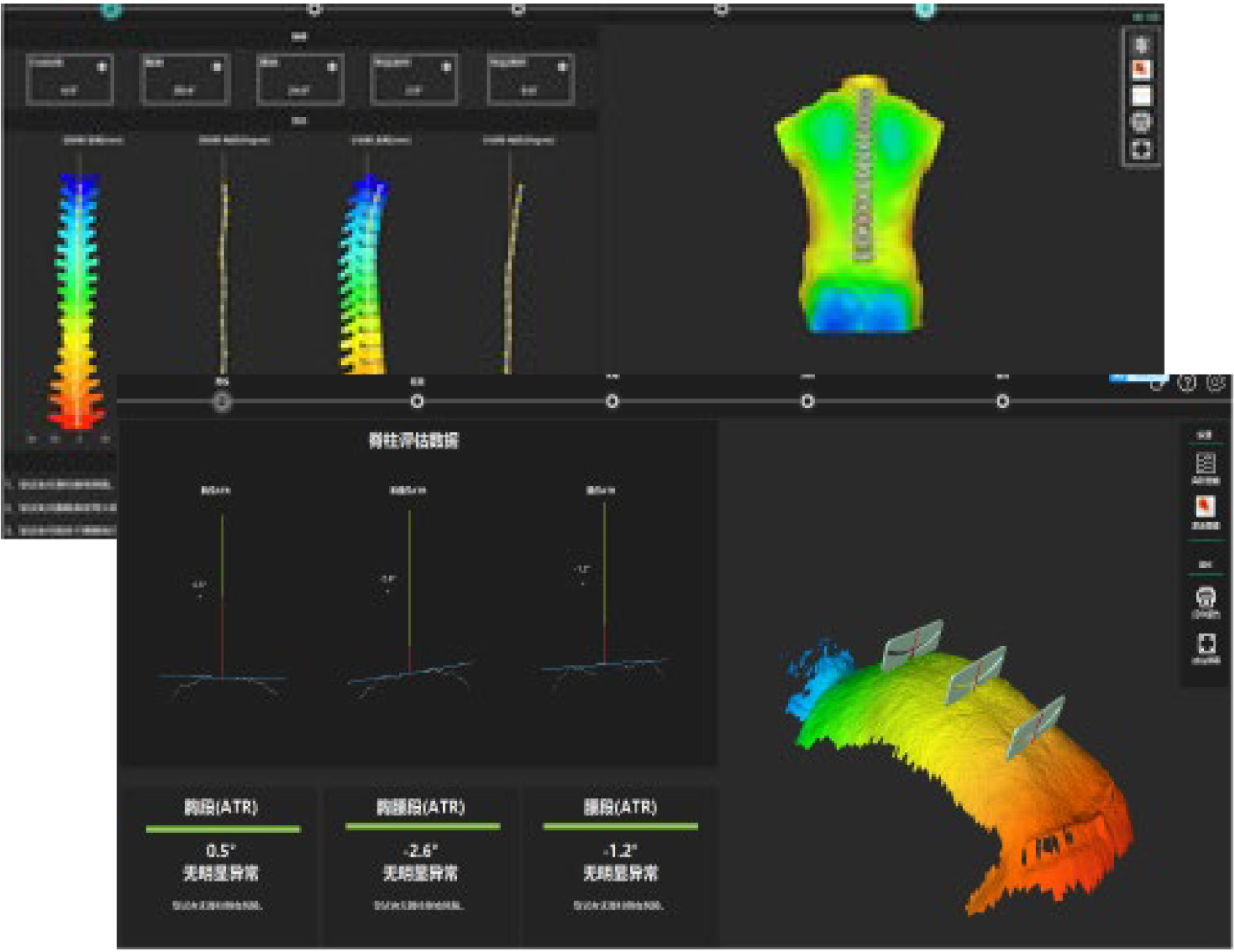

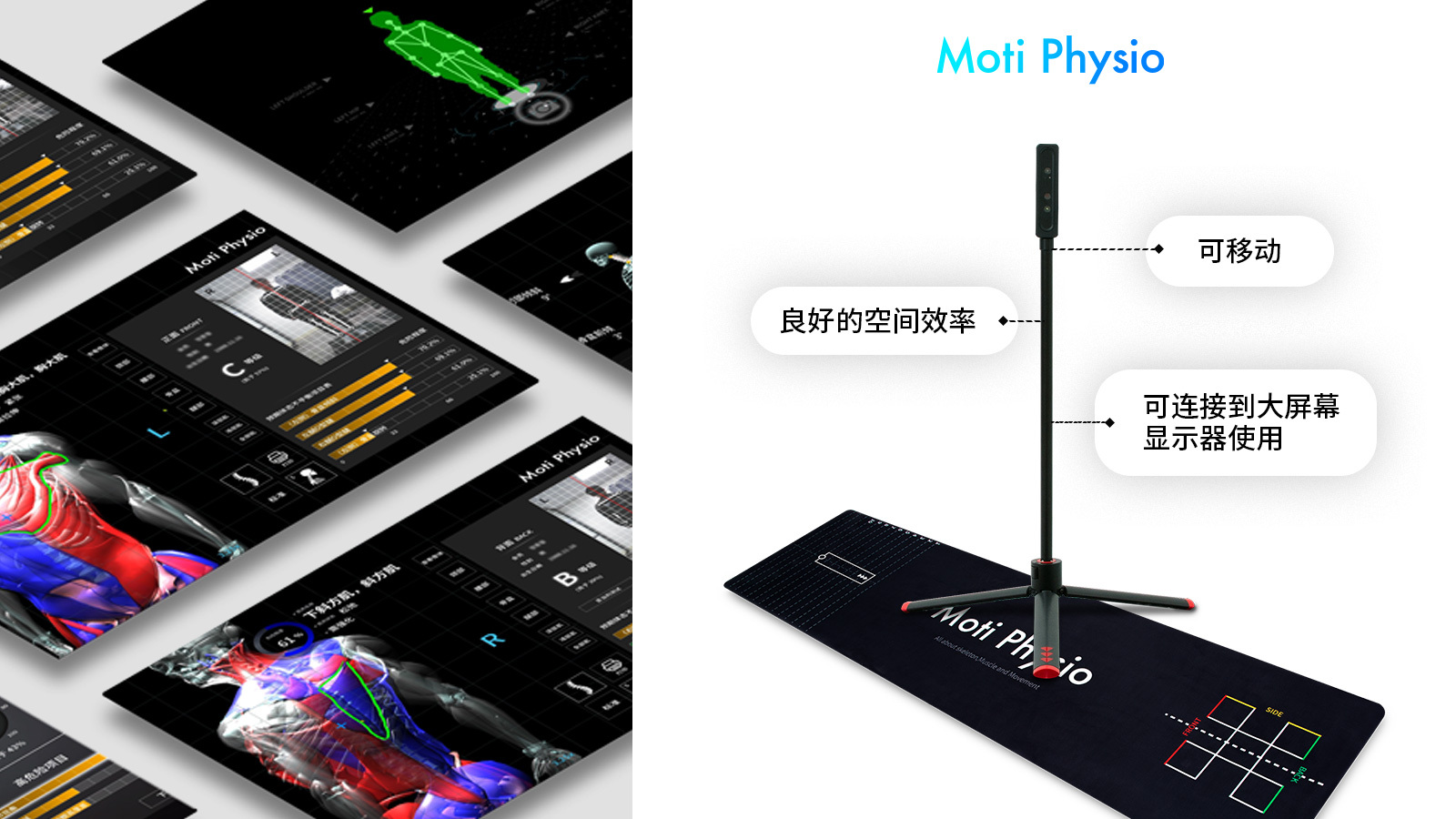
SIGMA-1 is a portable scoliosis scanner specially designed for rapid measurement and screening of scoliosis without radiation and contact. The scanner adopts the latest laser radar imaging (TOF) and simulation technology, which can accurately capture the three-dimensional image of the human back and automatically recognize the spinal morphology. It is widely used in fields such as sports and fitness, medical health, and body posture surveys. According to user needs, there are two usage modes: spinal curvature angle (Cobb) mode and trunk rotation angle (ATR) mode.